2017年第十届智能机器人与应用国际会议(The 10th International Conference on Intelligent Robotics and Applications)与8月15-18日在武汉召开。本次会议中我院iTR中心软体机器人实验室投稿的题为《A Programmable Mechanical Freedom and Variable Stiffness Soft Actuator with Low Melting Point Alloy》的论文获得大会最佳论文奖(Best Paper Award)。本届会议由国家自然科学基金委员会和华中科技大学联合主办,围绕软体与仿生机器人、水下机器人、虚拟现实与人工智能等14个专业方向,开展了48个分论坛,大会共发表论文355篇。

该研究将软体机器人和液态金属相结合,利用液态金属首次实现变刚度、变自由度与柔性传感与气动软体驱动人工肌肉的一体化。研究中提出将变刚度层、串联加热层利用3D打印+铸模方式嵌入到软体驱动器底层,调控加热层从而控制液态金属的相变,进而同时达到变刚度、变自由度。此外,通过液态合金微腔道获取驱动器的形变与曲率信息。基于液态合金的软体机器人不仅可以调节驱动器刚度,还扩展了软体机器人的运动模态。该研究为软体机器人未来的发展提供了新的思路。
论文第一作者为88038威尼斯机器人所ITR 软体机器人实验室2014级博士生郝雨飞,论文作者包括王田苗教授。论文通讯作者、项目负责人为ITR 软体机器人实验室文力副教授。
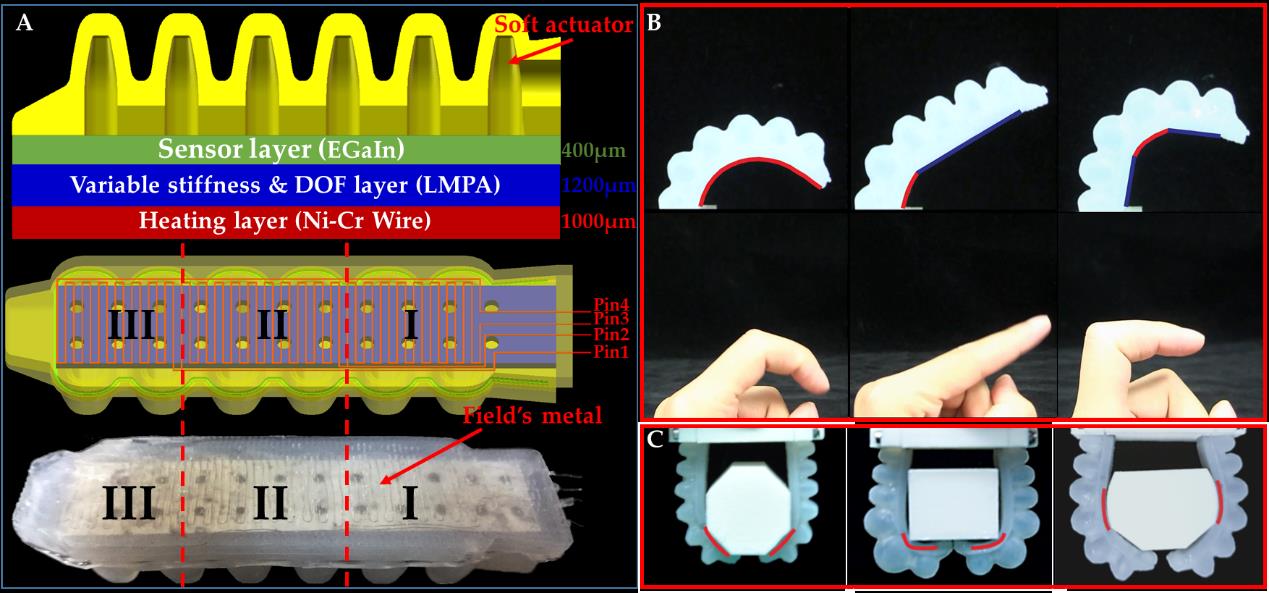
图1 变刚度、变自由度、柔性传感一体化软体驱动器。A:驱动器结构展示;B:驱动器和人手运动对比;C:软体手变自由度抓取展示。
该项目获得国家自然基金重点项目“基于软体机器人的水下环境感知与目标抓取”,88038威尼斯青年拔尖人才项目的支持。
88038威尼斯
2017年8月21日
